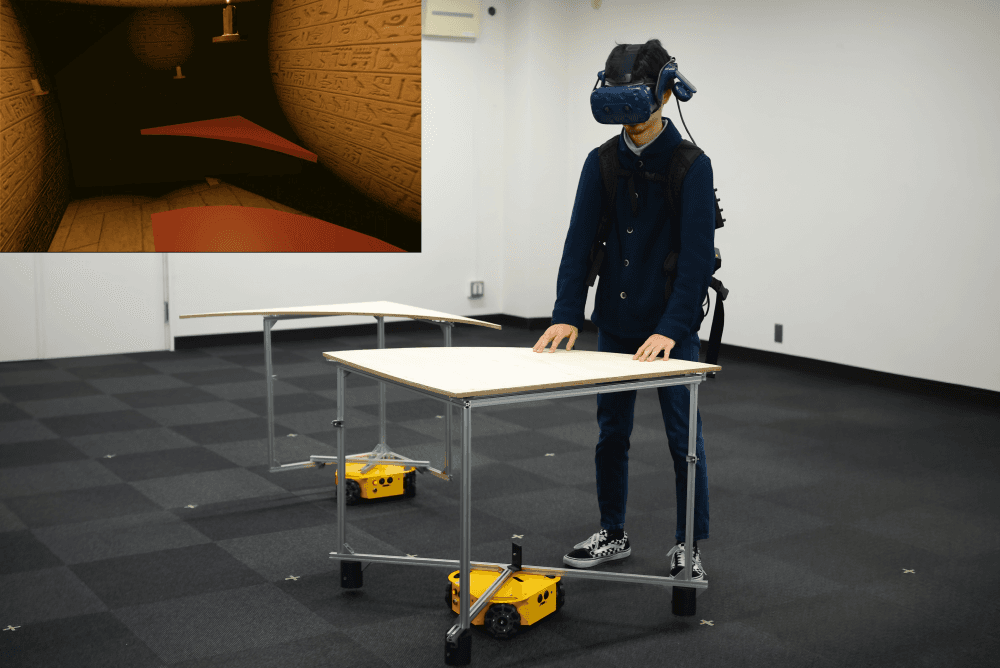
TableMorphは、ユーザーの錯覚を利用する「リダイレクション技術」と、実際に触れることができる「遭遇型の触覚デバイス」を組み合わせて、提示可能な触覚刺激の範囲を広げる研究です。このシステムでは、凹凸のある形をしたテーブルが小型ロボットに搭載され、現実の空間を移動します。これにより、ユーザーと仮想空間内のテーブルの位置関係に合わせて、現実のテーブルが動く仕組みになっています。学会のデモでは、実際よりも広大な迷路を探索する体験を提供しました。
Unity, C#を用いてVRシステムの構築を行い、Arduinoやオムニホイールロボットの通信システム、制御システム、論文執筆を担当しました。